運動量保存則:並進対称(ネーターの定理)
どうも(^^)/
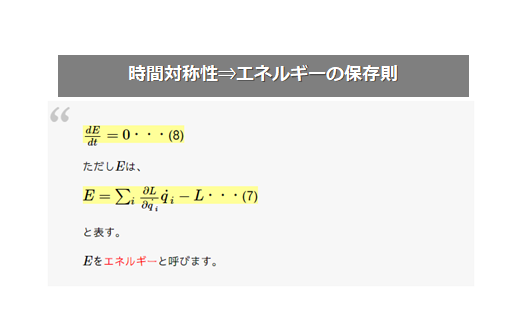
前回は、時間対称性(時間一様性)からエネルギー保存則を導きましたね。
ちょっと復習です(^^)
ネーターの定理
「系に連続的な対称性がある場合はそれに対応する保存則が存在する」と述べる定理である。
ドイツの数学者エミー・ネーターによって1915年に証明され、1918年に公表された。
解析力学や場の理論における重要な定理であります。
これだけ覚えておけば良いでしょう(^^)/
「対称性が何によるかによって保存則が決まっている」という理解です。
| 対称性 | 保存則 |
| 時間対称性 | エネルギー保存則 |
| 並進対称性 | 運動量保存則 |
| 回転対称性 | 角運動量保存則(モーメントの保存) |
| ゲージ対称性(位相変換) | 電荷保存則 |
今回は、並進対称性(空間一様性)なら運動量保存則が存在するといのを見ていこうと思います(^^)/
では、やっていきましょう♪
並進対称性(空間一様性)⇔運動量保存則
さて、空間に対して一様であるということは、
系全体を微小変位\(\epsilon \)だけ動かしても、ラグランジアン\(L\)が変わらないということです。
1~n個の質点があって、全ての質点を\(\epsilon \)だけ動かします。
つまり式で書くと、
\(\delta L=0\)ということです。
(1)式の右辺を、
と続ければ、
と、このようになります。
\(\bf{\epsilon}\)は任意なので、どんな微小変位\(\bf{\epsilon}\)に対して(2)式が0になるためには、
ですね(^^)/
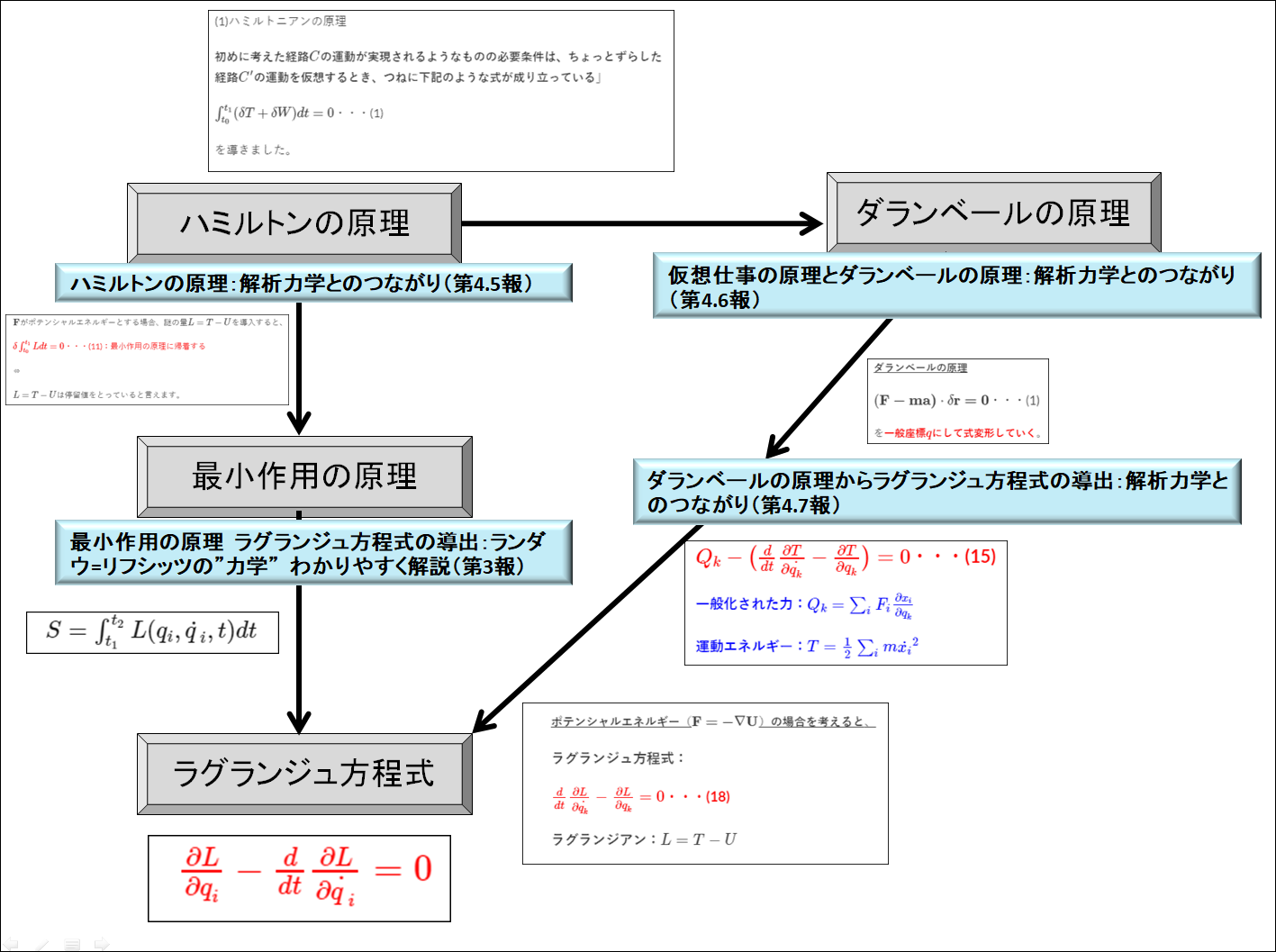
ここで、ラグランジュ方程式\(\frac{d}{dt}\frac{\partial L}{\partial \dot{\boldsymbol{v}}_{a}}=\frac{\partial L}{\partial \boldsymbol{r}_{a}}\)を使うと(3)式は、
となります。
(4)式について、いったん
と、このようにおきましょう。
これを\(\boldsymbol{P}\)を運動量と呼ぶそうです(笑)
なぜよそよそしく運動量と言っているのかと言いますと、あくまで(5)式とおくと(4)式より、
となっただけで(5)式が運動量かどうかわからないからです。
ただここでひとつの結論を導くことができました。
それは、
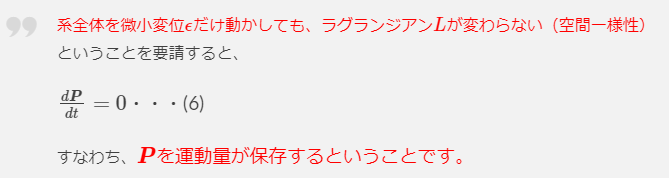
系全体を微小変位\(\epsilon \)だけ動かしても、ラグランジアン\(L\)が変わらない(空間一様性)ということを要請すると、
\begin{align*}\frac{d \boldsymbol{P}}{dt}=0\cdot\cdot\cdot (6)\end{align*}
すなわち、\(\boldsymbol{P}\)を運動量が保存するということです。
では、(5)式がよく知っている運動量の形になっているのかを確認すれば、自信を持って(5)式が運動量と呼ぶことができるので、それを見ていこうと思います。
(5)式が運動量の形になっているのか確認
確認しましょう(^^)/
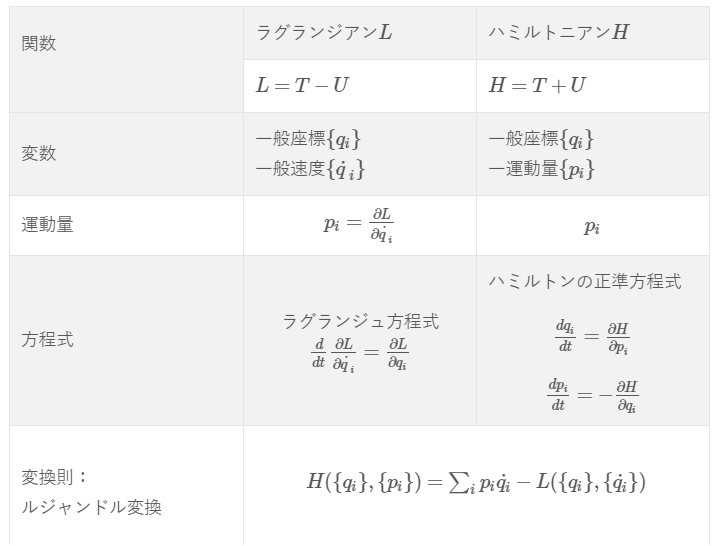
まず、ラグランジアン\(L\)についてですね。
ラグランジアン\(L\)は、外力などが保存力\(\boldsymbol{F}=-\nabla U\)であれば次のように書けたのでしたね。
T:運動エネルギー
U:ポテンシャルエネルギー
ラグランジアン\(L\)をもっと具体的に書いておくと、
なので、ポテンシャルエネルギー\(U\)は座標にしか依存しないので、\(\frac{\partial L}{\partial \boldsymbol{v}_{a}}=\frac{\partial T}{\partial \boldsymbol{v}_{a}}\)ですね。
運動エネルギーは、
なので、(5)式より
となり、運動量になりましたね。
(9)式を見ると、各質点の運動量の総和の形になっています。
やはり、\(\boldsymbol{P}=\frac{\partial L}{\partial \boldsymbol{v}_{a}}\)は運動量だったわけです。
まとめ
並進対称性(空間一様性)とすると、運動量保存則が成り立つ。
\begin{align*}\frac{d \boldsymbol{P}}{dt}=0\cdot\cdot\cdot (8)\end{align*}
ただし\(\bf{P}\)は、
\begin{align*}\boldsymbol{P}=\sum_{a}\frac{\partial L}{\partial \boldsymbol{v}_{a}}\cdot\cdot\cdot (5)\end{align*}
と表す。
\(\boldsymbol{P}\)を運動量と呼びます。
次回
次回は、「回転対称性(空間等方性)」から「角運動量保存(モーメント保存)」を見てみましょう(^^)/