変数の一部を変換するラウシアンを考える意義
前回に、ラウシアンについて紹介しましたが、本日はラウシアンを考える意味について少しふれておこうと思います。
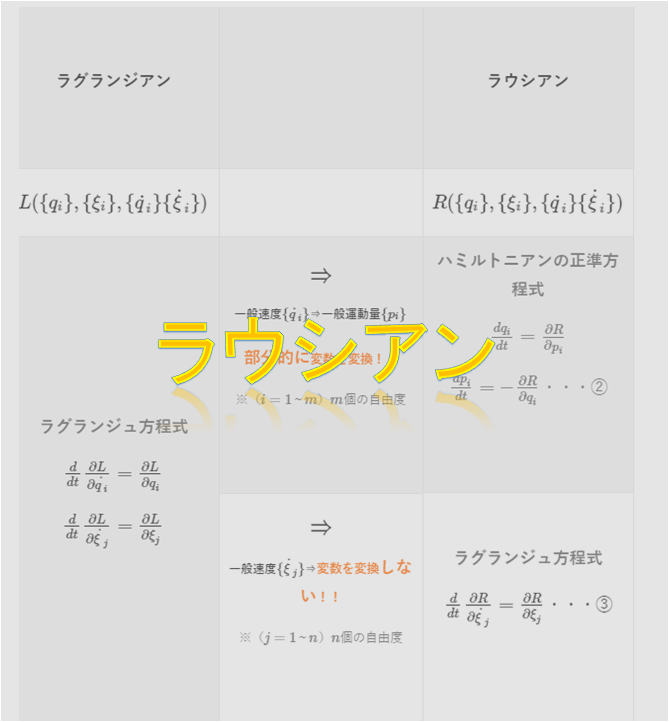
ラウシアンの概要説明
変数である一般速度\(\dot{q}_{1},\dot{q}_{2},・・・,\dot{q}_{i},・・・,\dot{q}_{m},\dot{\xi}_{1},\dot{\xi}_{2},・・・,\dot{\xi}_{j},・・・,\dot{\xi}_{n}\)とあったときに、\(\{\dot{q}_{i}\}\)については一般運動量\(\{p_{i}\}\)に変換しますが、
一般速度\(\{\dot{\xi}_{j}\}\)については一般速度\(\{\dot{\xi}_{j}\}\)のままにしておくということを意味しています。
このようにした方が便利な場合もあるのです。
| ラグランジアン |
|
ラウシアン |
| \(L(\{q_{i}\},\{\xi_{i}\},\{\dot{q}_{i}\}\{\dot{\xi}_{i}\})\) |
|
\(R(\{q_{i}\},\{\xi_{i}\},\{p_{i}\}\{\dot{\xi}_{i}\})\) |
|
ラグランジュ方程式 \(\frac{d}{dt}\frac{\partial L}{\partial \dot{q}_{i}}=\frac{\partial L}{\partial q_{i}}\) \(\frac{d}{dt}\frac{\partial L}{\partial \dot{\xi}_{j}}=\frac{\partial L}{\partial \xi_{j}}\) |
⇒ 部分的に変数を変換!! ※(\(i=1~m\))\(m\)個の自由度 |
ハミルトニアンの正準方程式 \(\frac{dq_{i}}{dt}=\frac{\partial R}{\partial p_{i}}\)・・・② \(\frac{dp_{i}}{dt}=-\frac{\partial R}{\partial q_{i}}\)・・・③
|
|
⇒ 変数を変換しない!! ※(\(j=1~n\))\(n\)個の自由度 |
ラグランジュ方程式 \(\frac{d}{dt}\frac{\partial R}{\partial \dot{\xi}_{j}}=\frac{\partial R}{\partial \xi_{j}}\)・・・④
|
このときにラグランジア\(L(\{q_{i}\},\{\xi_{i}\},\{\dot{q}_{i}\}\{\dot{\xi}_{i}\})\)からラウシアンへ\(R(\{q_{i}\},\{\xi_{i}\},\{\dot{q}_{i}\}\{\dot{\xi}_{i}\})\)の変換は、
です。
変数を変換したいものだけ⑤のようにルジャンドル変換をすれば良いのですね。
部分的に変換するこのラウシアンを導入すると何が嬉しいのか?
ラウシアンを利用するのには、
いや、もっと広い意味ではハミルトンの正準方程式を考える意味は、むしろ循環座標が存在するときに最も効力を発揮します。
循環座標
その前に循環座標って何でしょうかね?(笑)
一般的にはラグランジアン\(L\)がある座標の変数を陽に含まないとき、その座標を循環座標と言います。
具体例を挙げますと、
中心力が存在する場合なんてのがその例でしょうか。
ラグランジアン\(L\)の変数を書くと、\(L(r,\theta,\dot{r},\dot{\theta})\)と書きたいところですが、(6)式には\(\theta\)がありません。
ですので、\(L(r,\dot{r},\dot{\theta})\)となります。
このとき、\(\theta\)を循環座標と言います。
循環座標の共役運動量は保存量
循環座標であることがラウシアンを導入することの嬉しさは際立たせるのです。
\(\theta\)や\(\dot{\theta}\)に関する基礎式としては、
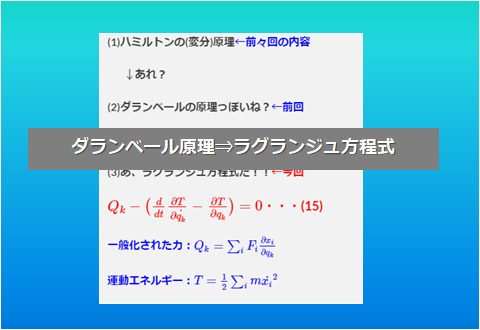
ラグランジュ方程式
ですが、ラグランジアン\(L\)が\(\theta\)に依存していないので、⑦式の右辺は0ですよね。
つまり、
となります。
\(\theta\)の共役運動量が
であることを思い出すと、
(9)式より、
⇔
↑循環座標である\(\theta\)の共役運動量は保存量なのです。
その意味は何でしょうか?
保存量なら、変数として考える必要ないですよね(笑)
ということは、特別\(p_{\theta}\)を解くための方程式を用意する必要がないのです。
別の言い方をすると、系を記述するための自由度が減っています。
それはとても嬉しいことです。
自由度が多いということは、それを解くための方程式も自由度の数だけ用意する必要があるため、
「そんな数の連立方程式を解けるかー!!」
となる場合が多いのですが、方程式の数が減るだけで問題はずっと解きやすくなるのです。
とても嬉しいのです(^^)
ラウシアンを導入することの嬉しさがようやく見えてきた
⑤式を今、扱っている問題で考えるならば、
変数である一般速度(\(\dot{r},\dot{\theta}\))とあったときに、\(\dot{\theta}\)については一般運動量\(p_{\theta}\)に変換しますが、一般速度\(\dot{r}\)については一般速度\(\dot{r}\)のままにしておきます。
ラウシアンを書くと、
と、こんな感じです。
でも、ラグランジアン\(L\)が\(\theta\)に依存していないので、
↑これを見ると、当たり前ですが、ラグランジアン\(L\)が\(\theta\)に依存しないということは、ラウシアン\(R\)も\(\theta\)に依存しないことになります。
そうすると、⑬式の\(p_{\theta}\)については、⑩式で定数として決まっているので、④式
を使えば、単に\(r\)とその微分\(\dot{r}\)について解くだけということになります。
\(r\)について⑬式より解くことができれば、②式より
を使って、\(\theta(t)\)が求まります。
全体の流れ
ラグランジアンを作る
\begin{align*}L=T-U=\frac{m}{2}(\dot{r}^2+r^2\dot{\theta}^2)-U(r)\cdot\cdot\cdot (6)\end{align*}
※変数である一般速度(\(\dot{r},\dot{\theta}\))とあったときに、\(\dot{\theta}\)については一般運動量\(p_{\theta}\)に変換しますが、一般速度\(\dot{r}\)については一般速度\(\dot{r}\)のままにしておきます。
循環座標:\(\theta\)
※循環座標とはラグランジアンに陽に含まれない変数のこと。
循環座標の一般運動量を計算
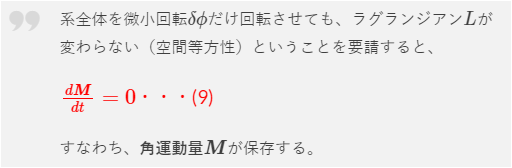
\begin{align*}p_{\theta}=\frac{\partial L}{\partial \dot{\theta}}\cdot\cdot\cdot (9)\end{align*}運動量保存則:並進対称(ネーターの定理):ランダウ=リフシッツの”力学”
\begin{align*}p_{\theta}=\alpha(=const)\cdot\cdot\cdot (10)\end{align*}
ラウシアンを作る
\begin{align*}R(r,\dot{r},p_{\theta})=p_{\theta}\dot{\theta}-L(r,\dot{r},\dot{\theta})\cdot\cdot\cdot (12)\end{align*}
\(r\)を求める
\begin{align*}\frac{d}{dt}\frac{\partial R(r,\dot{r},p_{\theta})}{\partial \dot{r}}=\frac{\partial R(r,\dot{r},p_{\theta})}{\partial r}\cdot\cdot\cdot (13)\end{align*}
を解くと、\(r(t)\)が求まる。
\(\theta\)を求める
\begin{align*}\frac{d\theta}{dt}=\frac{\partial R}{\partial p_{\theta}}\cdot\cdot\cdot (14)\end{align*}
を使って、\(\theta(t)\)が求まる。
全体の意味
<<力学的な状態>>というのは、「一般座標\(\{q_{i}\}\)と一般速度\(\{\dot{q}_{i}\}\)」もしくは「一般座標\(\{q_{i}\}\)もしくは一般運動量\(\{p_{i}\}\)」(n=1~f)で記述できます。
自由度はこの場合は、状態空間として\(2f\)です。
本来であれば、問題を解くために自由度の個数だけ式を用意する必要があります。
その連立方程式を解くことで解を得ることができるのですが、「もし仮に⑩式のように保存量が存在するように座標変換」することができれば、自由度がひとつ減らすことができます。
※\(p_{\theta}\)がconstなので。
つまり、自由度は\(2f-1\)になっているため、式は\(2f-1\)だけで良いことになります。
ずいぶん問題は解きやすくなっていることになりますね。
いや、もう少し考えると⑬式を見ると、変数は完全に\(r\)と\(\dot{r}\)だけになっているので、その式を除くと自由度は\(2f-2\)となっています。
これは問題がずいぶんと解きやすくなりそうですね。
だから全ての座標を循環座標に変換できれば、それと共役な運動量は\(\{p_{i}\}=const\)になるため、解くべき方程式は、
だけということになります。
そうすると自由度\(f\)ですか(^^)
思い・・・
そんな毎回循環座標が出てくる問題を扱うことも稀ですが、
正準変換によって、変数を循環座標に変換できるような手続きをしてやれば自由度がどんどん減って、問題が解ける状態までもっていける
のではないのでしょうか・・・・
一部だけ変換してこの恩恵を預かったのがラウシアンを導入する意義であり、正準変換は究極的にこの恩恵を受けるための手段ではないかと・・・
この辺が僕の勉強途中ですね(笑)