本日は、点変換の内容を書きたいと思います。
本記事の内容
点変換に対してラグランジュ方程式の形が変わらないことを確認する。
点変換とは?
点変換とは何でしょうか。
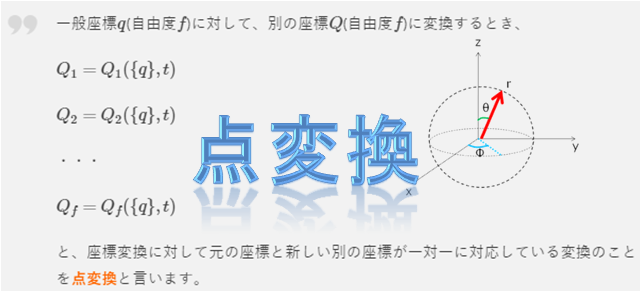
一般座標\({q}\)(自由度\(f\))に対して、別の座標\({Q}\)(自由度\(f\))に変換するとき、
\begin{align*}Q_{1}=Q_{1}(\{q\},t)\end{align*}
\begin{align*}Q_{2}=Q_{2}(\{q\},t)\end{align*}
・・・
\begin{align*}Q_{f}=Q_{f}(\{q\},t)\end{align*}
と、座標変換に対して元の座標と新しい別の座標が一対一に対応している変換のことを点変換と言います。
その逆も言えます。
座標変換に対して元の座標と新しい別の座標が一対一に対応しているので、下記のようにも書けます。
\begin{align*}q_{1}=q_{1}(\{Q\},t)\end{align*}
\begin{align*}q_{2}=q_{2}(\{Q\},t)\end{align*}
・・・
\begin{align*}q_{f}=q_{f}(\{Q\},t)\end{align*}
これは何も珍しい話ではないです。
座標の表し方はデカルト座標(\(x,y,z\))のみではなかったはずです。
例えば、極座標表示で下記のようにすることもできます。

このとき、
\begin{align*}x=r\sin\theta\cos\phi\cdot\cdot\cdot (1)\end{align*}
\begin{align*}y=r\sin\theta\sin\phi\cdot\cdot\cdot (2)\end{align*}
\begin{align*}z=r\cos\theta\cdot\cdot\cdot (3)\end{align*}
と書けます。
これを変数がわかるように書くと、
\begin{align*}x=x(r,\phi,\theta)\end{align*}
\begin{align*}y=y(r,\phi,\theta)\end{align*}
\begin{align*}z=z(r,\phi,\theta)\end{align*}
これは逆に、(1)(2)(3)式を式変形すると、
\begin{align*}r=r(x,y,z)\end{align*}
\begin{align*}\phi=\phi(x,y,z)\end{align*}
\begin{align*}\theta=\theta(x,y,z)\end{align*}
とできます。
もっと一般的に書いたらどうなるのかと言いますと、
\begin{align*}Q_{i}=Q_{i}(\{q\})\cdot\cdot\cdot (5)\end{align*}
と書けるのです。
これは元の座標の変数を使って、新しい座標の変数を作ったことになります。
時間を陽に含んでいるとしても良いので、
\begin{align*}Q_{i}=Q_{i}(\{q\},t)\cdot\cdot\cdot (6)\end{align*}
とできます。
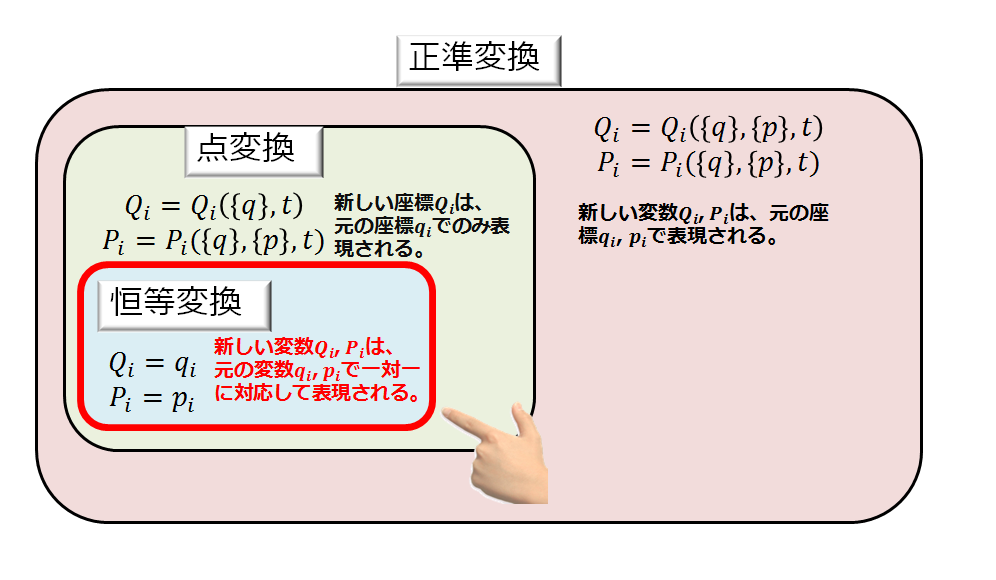
点変換は正準変換の一部
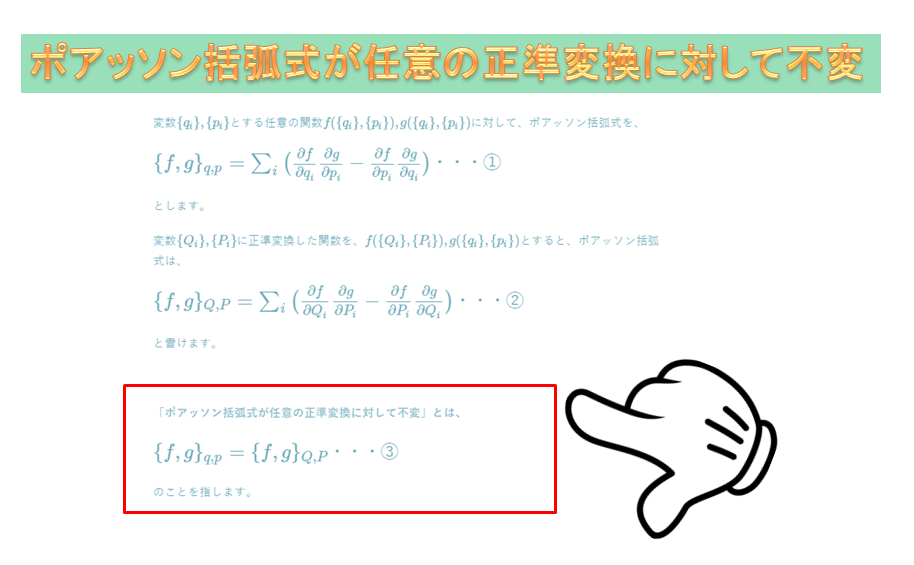
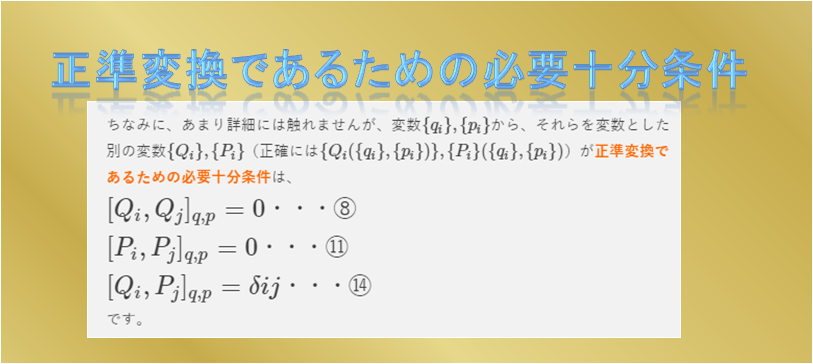
以上のように点変換を説明しましたが、解析力学では正準変換と言うのを勉強しましたが、点変換は正準変換の一部なのです。
正準変換のポイントは、正準変換は変数を座標だけではなく運動量も含めて、変数変換したときに、ハミルトンの正準方程式が変わらないということでした。
ポイント
解析力学の枠組みでこのように座標の変換に対して基礎方程式(ラグランジュ方程式、ハミルトンの正準方程式)が変わらないとするだけでなくて、もっと一般的に運動量も含めて(すなわち、運動量も座標と同等の独立変数として扱う)、ハミルトンの正準方程式の形を不変に保つことができるのです。
式で書くと、
\begin{align*}Q_{i}=Q_{i}(\{q\}\},\{p\},t)\cdot\cdot\cdot (6)\end{align*}
\begin{align*}P_{i}=P_{i}(\{q\},\{p\},t)\cdot\cdot\cdot (7)\end{align*}
↑そういう変換ができるのです。
これを正準変換と言います。
↓詳しくはこちらへ。
なので、点変換は正準変換の一部(座標のみ変換)であることがわかると思います。
再度ラグランジュ方程式を用いる理由
\begin{align*}x=r\sin\theta\cos\phi\cdot\cdot\cdot (1)\end{align*}
\begin{align*}y=r\sin\theta\sin\phi\cdot\cdot\cdot (2)\end{align*}
\begin{align*}z=r\cos\theta\cdot\cdot\cdot (3)\end{align*}
のように問題に応じて、\(r,\phi,\theta\)のように座標変換をすると思いますが、このように座標変換をすると、運動方程式だけを使うと少々厄介なことが起こるのでしたよね。
デカルト座標系での運動方程式は、
x方向:
\begin{align*}m\ddot{x}=F\end{align*}
y方向:
\begin{align*}m\ddot{x}=F\end{align*}
z方向:
\begin{align*}m\ddot{x}=F\end{align*}
でしたが、これを座標変換すると、
r方向:
\begin{align*}m\big(\ddot{r}-r\dot{\phi}^2\sin^2{\theta}-r\dot{\theta}^2)=F_{r}\cdot\cdot\cdot (8)\end{align*}
\(\phi\)方向:
\begin{align*}m\big(r\ddot{\theta}+2\dot{r}\dot{\theta}-r\dot{\phi}^2\sin{\theta}\cos{\theta})=F_{\phi}\cdot\cdot\cdot (9)\end{align*}
\(\theta\)方向:
\begin{align*}m\big(r\ddot{\phi}\sin{\theta}+2\dot{r}\dot{\phi}\sin{\theta}+2r\dot{\theta}\dot{\phi}\cos{\theta})=F_{\theta}\cdot\cdot\cdot (10)\end{align*}
※\(\frac{dr}{dt}=\dot{r}\)、\(\frac{d^2r}{dt^2}=\ddot{r}\)
このように見た目ががらりと変わってしまいます。
これでは、各座標系に対して、運動方程式の形を覚えておかなければならないため、”少々厄介”だと言いました。
※別に運動法則が座標系で変わっているというわけではなく、座標系を変えたことで、「加速度」「力」などの見え方が変わっただけです。
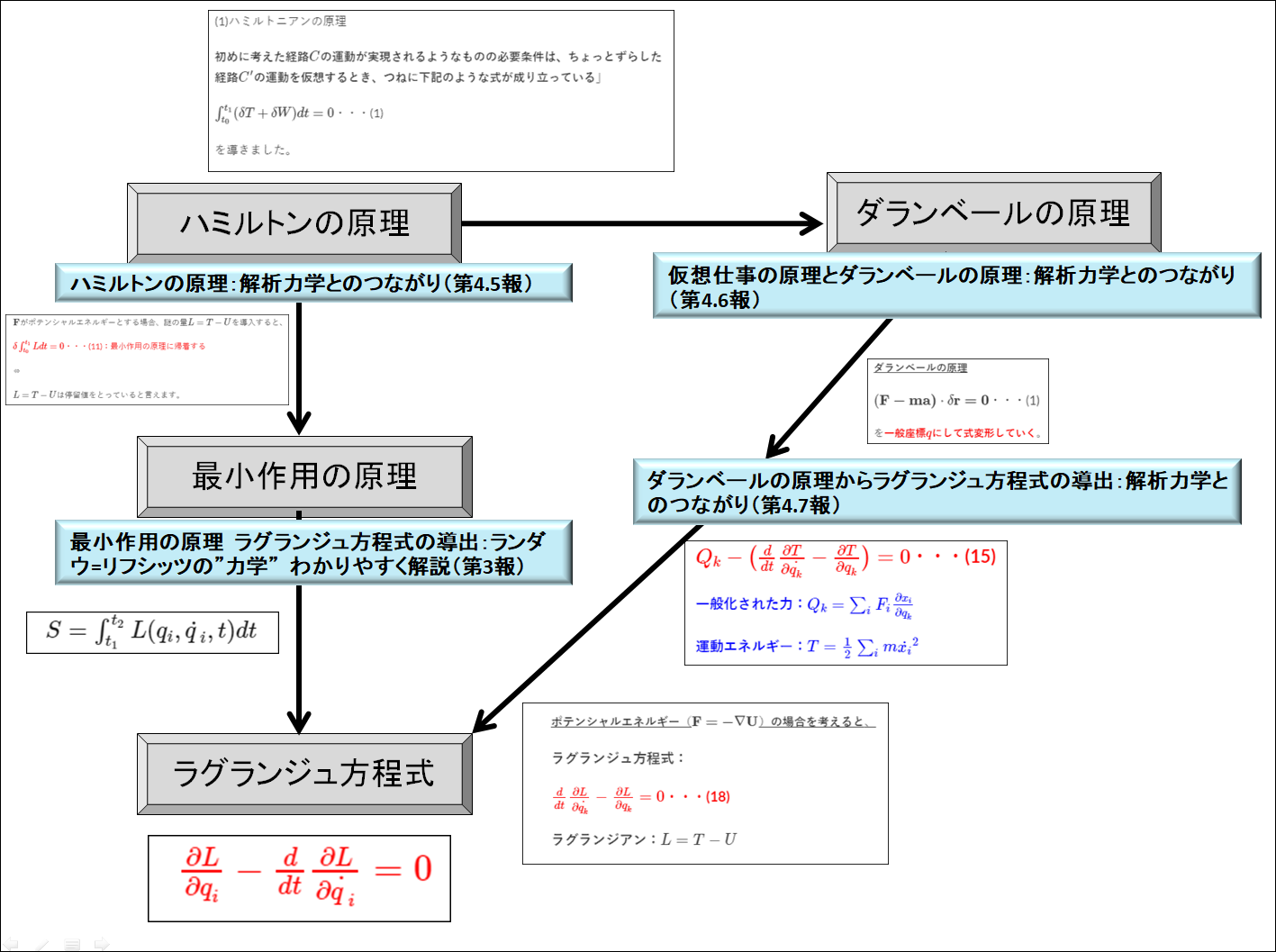
これをより一般的な座標系と一般的な速度を用いて、座標系の取り方に依らない運動法則の記述の仕方を与えてくれたのが、ラグランジュ方程式です。
ラグランジュ方程式
\begin{align*}\frac{d}{dt}\frac{\partial L}{\partial \dot{q_{i}}}=\frac{\partial L }{\partial q_{i}}\cdot\cdot\cdot (\diamondsuit)\end{align*}
これを用いれば、(8)(9)(10)のような運動方程式の形を覚えておかなくても、
\begin{align*}\frac{d}{dt}\frac{\partial L}{\partial \dot{r}}=\frac{\partial L }{\partial r}\cdot\cdot\cdot (11)\end{align*}
\begin{align*}\frac{d}{dt}\frac{\partial L}{\partial \dot{\phi}}=\frac{\partial L }{\partial \phi}\cdot\cdot\cdot (12)\end{align*}
\begin{align*}\frac{d}{dt}\frac{\partial L}{\partial \dot{\theta}}=\frac{\partial L }{\partial \theta}\cdot\cdot\cdot (13)\end{align*}
さえ覚えておけば、
ラグランジアン
\(L=T-U\)=(運動エネルギー)ー(ポテンシャルエネルギー)
を作って、(11)(12)(13)に代入すれば、運動方程式が導出できます。
ラグランジュ方程式が点変換に対して不変
しかし、ここで気になることがあります。
本当に点変換(座標変換)に対して、ラグランジュ方程式は不変なのでしょうか?
愚問と言えば愚問かもしれません(笑)
なぜなら、ラグランジュ方程式は最小作用の原理に従って、一般座標と一般速度から導出したのですから、そもそもどんな座標系だったかは説いていなかったので、「いまさら何を」と言う感じです(笑)
一般運動量も含めた座標変換である正準変換に対して、ラグランジュ方程式と等価なハミルトンの正準方程式が不変になるような変換が可能であるのです。
ま、そうは言わずに勉強だと思って一応確認してみましょう(^^)/
下記のような、
\begin{align*}Q_{1}=Q_{1}({q},t)\end{align*}
\begin{align*}Q_{2}=Q_{2}({q},t)\end{align*}
・・・
\begin{align*}Q_{f}=Q_{f}({q},t)\end{align*}
という座標変換(点変換)に対して、ラグランジュ方程式が不変である。
ラグランジュ方程式
\begin{align*}\frac{d}{dt}\frac{\partial L}{\partial \dot{q_{i}}}=\frac{\partial L }{\partial q_{i}}\cdot\cdot\cdot (\diamondsuit)\end{align*}
↓
\begin{align*}\frac{d}{dt}\frac{\partial L}{\partial \dot{Q_{i}}}=\frac{\partial L }{\partial Q_{i}}\cdot\cdot\cdot (\diamondsuit\diamondsuit)\end{align*}
を示すことに他なりません。
では、やってみましょう。
ここから大事なのは、腕力です。
ただひたすら計算するだけですので、特に結果だけ知りたいよっていう方は(\(\diamondsuit\))と(\(\diamondsuit\diamondsuit\))だけ覚えておけば十分でしょう(笑)
ラグランジュ方程式が点変換に対して不変であることの証明
示したいのは、
\begin{align*}\frac{d}{dt}\frac{\partial L}{\partial \dot{Q_{i}}}=\frac{\partial L }{\partial Q_{i}}\cdot\cdot\cdot (\diamondsuit\diamondsuit)\end{align*}
です。
※ここでは、単なる座標変換に対してラグランジュ方程式が不変であることを示したいので、ラグランジアンが座標が時間に陽に依存している場合は考えないものとします。
(\(q_{i}=q_{i}(Q_{i})\)の形に限った話にします)
まず、
\begin{align*}\frac{\partial L}{\partial Q_{i}}=\sum_{j}\big(\frac{\partial L}{\partial q_{j}}\frac{\partial q_{j}}{\partial Q_{i}}+\frac{\partial L}{\partial \dot{q}_{j}}\frac{\partial \dot{q}_{j}}{\partial Q_{i}}\big)\cdot\cdot\cdot (14)\end{align*}
\begin{align*}\frac{\partial L }{\partial \dot{Q}_{i}}=\sum_{j}\big(\frac{\partial L}{\partial q_{j}}\frac{\partial q_{j}}{\partial \dot{Q}_{i}}+\frac{\partial L}{\partial \dot{q}_{j}}\frac{\partial \dot{q}_{j}}{\partial \dot{Q}_{i}}\big)\cdot\cdot\cdot (15)\end{align*}
ここで、少しずつ整理していきましょう。
ここで、力学的な状態は互いに独立な変数\(\{q_{i}\},\{\dot{q}_{i}\}\)を指定すれば、その後の運動はラグランジュ方程式に従って決定されるということでしたから、座標変換後の独立な変数\(\{Q_{i}\},\{\dot{Q}_{i}\}\)として議論を進めていくことになります。
そのことに注意しつつ、まず、(15)式の第一項
\begin{align*}\frac{\partial L}{\partial q_{j}}\frac{\partial q_{j}}{\partial \dot{Q}_{i}}=0\end{align*}
となります。
※なぜなら、
\begin{align*}\frac{\partial q_{j}}{\partial \dot{Q}_{i}}=\sum_{k}\frac{\partial q_{j}}{\partial Q_{k}}\frac{\partial Q_{k}}{\partial \dot{Q}_{i}}=0\end{align*}
\(Q_{k},\dot{Q}_{i}\)は互いに独立なので0になります。
(15)式が、
\begin{align*}\frac{\partial L }{\partial \dot{Q}_{i}}=\sum_{j}\big(\frac{\partial L}{\partial \dot{q}_{j}}\frac{\partial \dot{q}_{j}}{\partial \dot{Q}_{i}}\big)\cdot\cdot\cdot (16)\end{align*}
ここで、(16)式の右辺\(\frac{\partial \dot{q}_{j}}{\partial \dot{Q}_{i}}\)は、
\begin{align*}\frac{\partial \dot{q}_{j}}{\partial \dot{Q}_{i}}=\frac{\partial q_{i}}{\partial Q_{i}}\end{align*}
であることが示されます。
下記に証明しておきます。
\(q_{i}=q_{i}(Q_{i})\)なので、偏微分公式に従って、
\begin{align*}(\dot{q}_{i}=)\frac{dq_{i}}{dt}=\sum_{j}\frac{\partial q_{i}}{\partial Q_{j}}\frac{dQ_{j}}{dt}\end{align*}
となります。
ここで、両辺\(\dot{Q}_{j}\)で偏微分します。
\begin{align*}\frac{\partial \dot{q}_{i}}{\partial \dot{Q}_{j}}=\frac{\partial }{\partial \dot{Q}_{j}}\sum_{j}\frac{\partial q_{i}}{\partial Q_{j}}\dot{Q}_{j}\end{align*}
となります。
\(\sum_{j}\)に対しては、\(j\)のみが偏微分実行後に残り、その他は0になるので、
\begin{align*}\frac{\partial \dot{q}_{j}}{\partial \dot{Q}_{i}}=\frac{\partial q_{i}}{\partial Q_{i}}\cdot\cdot\cdot (17)\end{align*}
となります。
ゆえに、(16)式は、
\begin{align*}\frac{\partial L }{\partial \dot{Q}_{i}}=\sum_{j}\big(\frac{\partial L}{\partial \dot{q}_{j}}\frac{\partial q_{j}}{\partial Q_{i}}\big)\cdot\cdot\cdot (18)\end{align*}
となります。
ここで、(\(\diamondsuit\diamondsuit\))の形に近づけるために時間微分をしましょう。
\begin{align*}\frac{d}{dt}\frac{\partial L }{\partial \dot{Q}_{i}}=\sum_{j}\bigg(\frac{d}{dt}\big(\frac{\partial L}{\partial \dot{q}_{j}}\big)\frac{\partial q_{j}}{\partial Q_{i}}+\frac{\partial L}{\partial \dot{q}_{j}}\frac{d}{dt}\big(\frac{\partial q_{j}}{\partial Q_{i}}\big)\bigg)\cdot\cdot\cdot (19)\end{align*}
さらに、(18)式の\(\frac{d}{dt}\big(\frac{\partial q_{j}}{\partial Q_{i}}\big)\)に対しては、
\begin{align*}\frac{d}{dt}\big(\frac{\partial q_{j}}{\partial Q_{i}}\big)=\frac{\partial \dot{q}_{j}}{\partial Q_{i}}\end{align*}
が示されます。
下記に証明しておきます。
まず、
\begin{align*}\frac{d}{dt}\big(\frac{\partial q_{j}}{\partial Q_{i}}\big)=\sum_{k}\frac{\partial }{\partial Q_{k}}\frac{\partial q_{j}}{\partial Q_{i}}\frac{dQ_{k}}{dt}\cdot\cdot\cdot (20)\end{align*}
次に、
\begin{align*}\dot{q}_{j}=\sum_{k}\frac{\partial q_{j}}{\partial Q_{k}}\frac{dQ_{k}}{dt}\end{align*}
なので、
\begin{align*}\frac{\partial \dot{q}_{j}}{\partial Q_{i}}=\sum_{k}\frac{\partial }{\partial Q_{i}}\frac{\partial q_{j}}{\partial Q_{k}}\frac{dQ_{k}}{dt}\cdot\cdot\cdot (21)\end{align*}
となります。
ゆえに、(20)と(21)を比較すると、
\begin{align*}\frac{d}{dt}\big(\frac{\partial q_{j}}{\partial Q_{i}}\big)=\frac{\partial \dot{q}_{j}}{\partial Q_{i}}\cdot\cdot\cdot (22)\end{align*}
が示されました。
つまり、(19)式は、
\begin{align*}\frac{d}{dt}\frac{\partial L }{\partial \dot{Q}_{i}}=\sum_{j}\bigg(\frac{d}{dt}\big(\frac{\partial L}{\partial \dot{q}_{j}}\big)\frac{\partial q_{j}}{\partial Q_{i}}+\frac{\partial L}{\partial \dot{q}_{j}}\frac{\partial \dot{q}_{j}}{\partial Q_{i}}\bigg)\cdot\cdot\cdot (23)\end{align*}
となります。
では、(23)式ー(14)式を計算してみましょう。
\begin{align*}\frac{d}{dt}\frac{\partial L}{\partial \dot{Q_{i}}}-\frac{\partial L }{\partial Q_{i}}=\sum_{j}\bigg(\frac{d}{dt}\big(\frac{\partial L}{\partial \dot{q}_{j}}\big)\frac{\partial q_{j}}{\partial Q_{i}}+\frac{\partial L}{\partial \dot{q}_{j}}\frac{\partial \dot{q}_{j}}{\partial Q_{i}}\bigg)-\sum_{j}\bigg(\frac{\partial L}{\partial q_{j}}\frac{\partial q_{j}}{\partial Q_{i}}+\frac{\partial L}{\partial \dot{q}_{j}}\frac{\partial \dot{q}_{j}}{\partial Q_{i}}\bigg)\end{align*}
⇔
\begin{align*}\frac{d}{dt}\frac{\partial L}{\partial \dot{Q_{i}}}-\frac{\partial L }{\partial Q_{i}}=\sum_{j}\bigg(\frac{d}{dt}\big(\frac{\partial L}{\partial \dot{q}_{j}}\big)-\frac{\partial L}{\partial q_{j}}\bigg)\frac{\partial q_{j}}{\partial Q_{i}}\cdot\cdot\cdot (24)\end{align*}
(24)式の右辺の中身をよくみると、元の変数(\(q_{i},\dot{q}_{i}\))によるラグランジュ方程式(\(\diamondsuit\))があるので、右辺は0になります。
よって、
\begin{align*}\frac{d}{dt}\frac{\partial L}{\partial \dot{Q_{i}}}=\frac{\partial L }{\partial Q_{i}}\cdot\cdot\cdot (\diamondsuit\diamondsuit)\end{align*}
を示すことができました(^^♪
つまり、座標変換(点変換)に対してラグランジュ方程式が不変であることが示せました(^^)/
まとめ
一般座標\({q}\)(自由度\(f\))に対して、別の座標\({q}\)(自由度\(f\))に変換するとき、
\begin{align*}Q_{1}=Q_{1}(\{q\},t)\end{align*}
\begin{align*}Q_{2}=Q_{2}(\{q\},t)\end{align*}
・・・
\begin{align*}Q_{f}=Q_{f}(\{q\},t)\end{align*}
と、座標変換に対して元の座標と新しい別の座標が一対一に対応している変換のことを点変換と言います。
点変換は、正準変換の一部(座標のみを変換)であることを述べました。
点変換に対して、ラグランジュ方程式が不変であるということを証明しました。
\begin{align*}Q_{1}=Q_{1}(\{q\},t)\end{align*}
\begin{align*}Q_{2}=Q_{2}(\{q\},t)\end{align*}
・・・
\begin{align*}Q_{f}=Q_{f}(\{q\},t)\end{align*}
という座標変換(点変換)に対して、ラグランジュ方程式が不変である。
ラグランジュ方程式
\begin{align*}\frac{d}{dt}\frac{\partial L}{\partial \dot{q_{i}}}=\frac{\partial L }{\partial q_{i}}\cdot\cdot\cdot (\diamondsuit)\end{align*}
↓
\begin{align*}\frac{d}{dt}\frac{\partial L}{\partial \dot{Q_{i}}}=\frac{\partial L }{\partial Q_{i}}\cdot\cdot\cdot (\diamondsuit\diamondsuit)\end{align*}







初めまして、ラグランジアンが点変換で共変である事の証明がわからず調べてたところこちらのサイトにたどり着きました。わかりやすい説明有難うございます。
一点質問があるのですが、式15の補足証明(Q,Q’が独立である事を用いているところです。)のq_jのQ’_iの偏微分を書き直した左辺の偏微分について、q_jはQ_kで編微分するのではないでしょうか?
よろしければご回答お願い致します。
ご指摘ありがとうございます。
少し内容を見直しました。
昔に勉強ログとしてまとめたものですので、他にも不備や説明不足な点があるかと思います。
少しでもお役に立てれば良いですが、丁寧に確認するにはいたっておらず申し訳ございませんが、よろしくお願いいたします。
確認ありがとうございました!
勉強の助けになっております!ありがとうございます。