正準変換:一般座標と一般運動量の変数変換
どうも(^^)/
いよいよ正準変換の内容に来ました。
本記事の内容
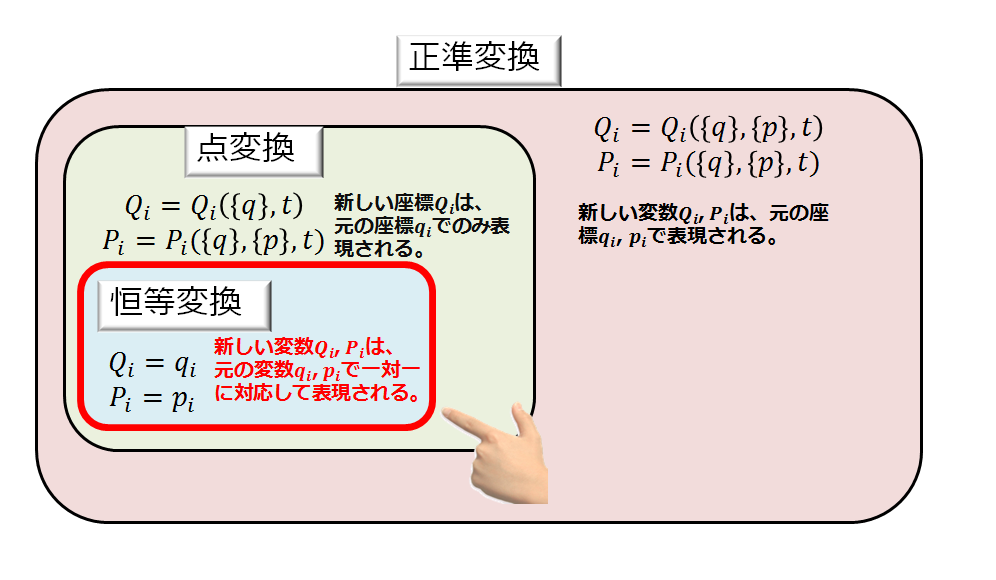
正準変換を使って一般座標\(\{q_{i}\}\)と一般運動量\(\{p_{i}\}\)から\(\{Q_{i}\}\)と\(\{P_{i}\}\)へ変数変換する。
解析力学は、変数変換の話ばっかりですね(笑)
一般速度\(\{\dot{q}_{i}\}\)から一般運動量一般速度\(\{p_{i}\}\)へ変換したりもしましたし。
正準変換を考える意味
どうして正準変換なんて考えるのでしょうか?
例えば、座標の表し方はデカルト座標(\(x,y,z\))のみではなかったはずです。
極座標表示で下記のようにしても良かったはずです。

そのとき、
と書けます。
これを変数がわかるように書くと、
これは逆に、(1)(2)(3)式を式変形すると、
とできます。
もっと一般的に書いたらどうなるのかと言いますと、
と書けるのです。
これは元の座標の変数を使って、新しい座標の変数を作ったことになります。
時間を陽に含んでいるとしても良いので、
とできます
解析力学の枠組みでこのように座標の変換に対して基礎方程式(ラグランジュ方程式、ハミルトンの正準方程式)が変わらないとするだけでなくて、もっと一般的に運動量も含めて(すなわち、運動量も座標と同等の独立変数として扱う)、ハミルトンの正準方程式の形を不変に保つことができるのです。
式で書くと、
↑そういう変換ができるのです。
これを正準変換と言います。
ただ、「偶然変換したらハミルトンの正準方程式の形が不変でしたよ」という話ではなくて、ハミルトンの正準方程式の形が不変であるための条件式が出てきます。
ハミルトンの正準方程式の形が不変であるためには?
ハミルトンの正準方程式の形が不変であるための条件式を導出するにあたって、まず思い出しておきたいことがあります。
そういえば、「ラグランジアンに時間の導関数を足しても(引いても)ラグランジュ方程式は変わらなかった」のでしたね。
つまり、(6)(7)の変換に対して新しいラグランジアン\({L}'(\{Q_{i}\},\{\dot{q}_{i}\},t)\)と、元ののラグランジアン\(L(\{q_{i}\},\{\dot{q}_{i}\},t)\)との間には次のような関係を持っても良いのです。
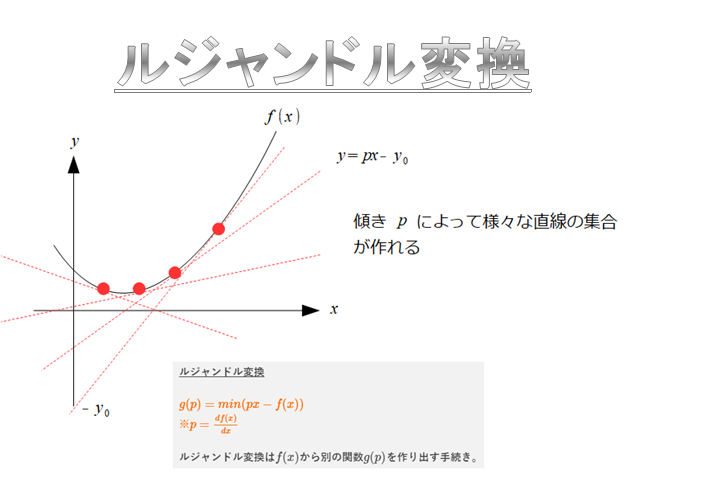
さらに、ラグランジアン\(L(\{q_{i}\},\{\dot{q}_{i}\},t)\)に関しては、ルジャンドル変換により、
とすることができます。
↓ここめっちゃ重要
それじゃー同じように、ラグランジアン\({L}'(\{\dot{q}_{i}\},\{p_{i}\},t)\)も、
とできた方が、わかりやすいですよね。
そこで、(10)式のラグランジアン\({L}’\)についてですが、
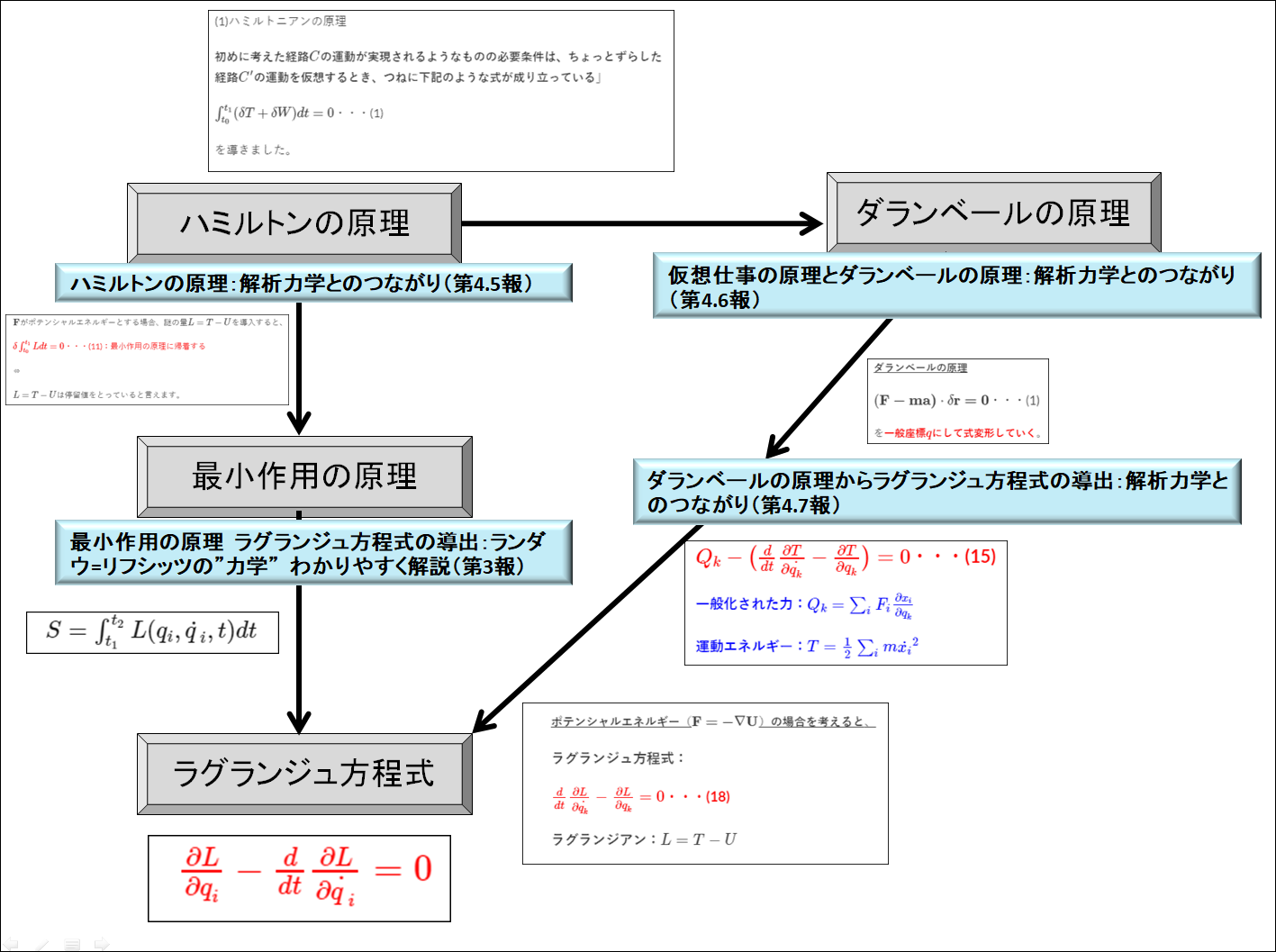
最小作用の原理を考えるとどうでしたかね?
ラグランジュ方程式が導けるのでしたよね!(^^)!
「最小作用の原理を考えるとラグランジュ方程式が導ける」
これは何を意味しているのかと言いますと、
同様に\({H}’\)もまたハミルトンの正準方程式も導けるということを意味しているのです。
つまり、
です。
そんな都合のいいことがあるのでしょうか?
むしろそうなるように、\({H}’\)の条件を決めてやればいいのです。
ハミルトンの正準方程式の形が不変であるための条件式
(9)(10)を(8)に代入してみましょう。
そうすると何か\({H}’\)の条件が出てきそうです。
⇔
⇔もう少し見やすく・・
ここで、\(W_{1}\)は何を変数とするべきでしょうか?
(11)を見ると\(\{q_{i}\}\)と\(\{Q_{i}\}\)を変数にすれば良さそうですね。
次回の記事で示しますが、一応ここでも述べておきましょう。
変数を\(\{q_{i}\}\)と\(\{Q_{i}\}\)を変数と選びしたが、ルジャンドル変換を使えば自在に変数を変えることができます!(^^)!
今は\(W_{1}(\{q_{i}\},\{Q_{i}\})\)ですが、これを
\(W_{1}(\{q_{i}\},\{Q_{i}\})\)
↓\(\{Q_{i}\}\)→\(\{P_{i}\}\)
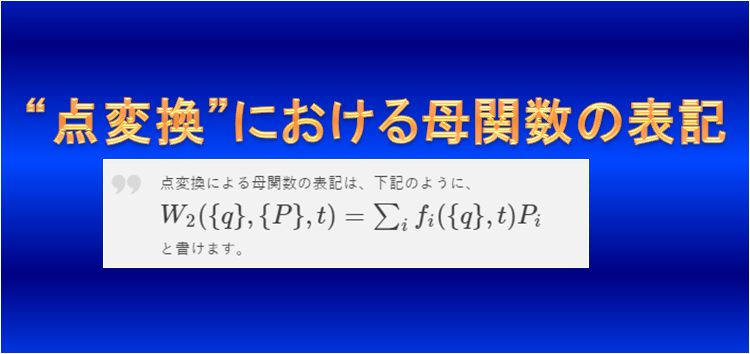
\(W_{2}(\{q_{i}\},\{P_{i}\})\)
↓\(\{q_{i}\}\)→\(\{p_{i}\}\)
\(W_{3}(\{p_{i}\},\{P_{i}\})\)
↓\(\{P_{i}\}\)→\(\{Q_{i}\}\)
\(W_{4}(\{p_{i}\},\{Q_{i}\})\)
つまり、元の変数\(\{q_{i}\}\)と\(\{p_{i}\}\)から一組選び、新しい変数\(\{Q_{i}\}\)と\(\{P_{i}\}\)から一組選ぶ方法の合計4パターンの変数の選び方があることになります。
\(F(\{q_{i}\},\{Q_{i}\},t)\)の場合に時間微分を考えます。
ここで、(13)と(14)を比較しましょう。
すると・・・
(17)式のような、関係式が出てきました(^^)/
この\(W_{1}\)のことを母関数と言います。
正準変換はこの母関数が重要な役割をしているということですね。
実際に問題を解く際の流れを示しておきましょう。
(1)\(W_{1}(\{q_{i}\},\{Q_{i}\},t)\)が与えらると、
↓
(2)(15)(16)式より、元の変数「\(\{q_{i}\}\),\(\{p_{i}\}\)」と
新しい変数「\(\{Q_{i}\}\)と\(\{P_{i}\}\)」との関係を与え、↓
(3)新しいハミルトニアン\({H}’\)を与える
↓
(4)さらに、ハミルトニアン\({H}’\)から(11)(12)式によって、運動方程式を与える
↓
(5)その運動方程式を解けば、新しい変数「\(\{Q_{i}\}\)と\(\{P_{i}\}\)」の時刻変化がわかる
と、こういった流れになります。
ところで、(8)と(17)を見比べてみましょう。
同じような変換に見えますが、⑧式は時間の導関数に対して⑰式は時間の偏微分になっています。
まとめ
解析力学の枠組みでこのように座標の変換に対して基礎方程式(ラグランジュ方程式、ハミルトンの正準方程式)が変わらないとするだけでなくて、もっと一般的に運動量も含めて(すなわち、運動量も座標と同等の独立変数として扱う)、ハミルトンの正準方程式の形を不変に保つことができるのです。
式で書くと、
↑そういう変換ができるのです。
これを正準変換と言います。
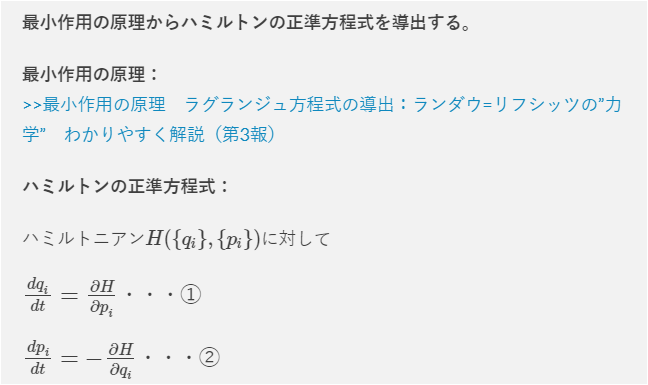
ハミルトンの正準方程式の形を不変に保つようにするので、変換後も
ハミルトンの正準方程式
が成り立ちます。
そうなるための、条件は
です。
ここで、\(W_{1}\)のことを母関数と言い正準変換はこの関数によって特徴づけられます。
次回
途中で軽く触れました、
\(W_{1}(\{q_{i}\},\{Q_{i}\})\)
↓\(\{Q_{i}\}\)→\(\{P_{i}\}\)
\(W_{2}(\{q_{i}\},\{P_{i}\})\)
↓\(\{q_{i}\}\)→\(\{p_{i}\}\)
\(W_{3}(\{p_{i}\},\{P_{i}\})\)
↓\(\{P_{i}\}\)→\(\{Q_{i}\}\)
\(W_{4}(\{p_{i}\},\{Q_{i}\})\)
元の変数\(\{q_{i}\}\)と\(\{p_{i}\}\)から一組選び、新しい変数\(\{Q_{i}\}\)と\(\{P_{i}\}\)から一組選ぶ方法の合計4パターンの変数の選び方がある
この変換について紹介しようと思います。
これはルジャンドル変換を使うわけですが、もっと重要なのは\(q_{i}\),\(p_{i}\),\(Q_{i}\),\(P_{i}\)もごちゃ混ぜにして変換していることになるので、正準変換での話の中ではもはや一般座標と一般運動量という名前(概念)が意味を持たなくなっていることです。
こんな変換をして一体単位はどうなっているのでしょうか(笑)
座標と運動量が同等の扱いで、「座標が解きには運動量の単位を持ち」「運動量が時には座標の単位になる」ということでしょうか。
母関数が\(W_{1}=\sum_{i}q_{i}Q_{i}\)のときに正準変換すると完全に座標と運動量が入れ替わってしまった(笑)
特に母関数が\(W_{1}=\sum_{i}q_{i}Q_{i}\)のとき、\(Q_{i}=p_{i}\),\(P_{i}=-q_{i}\)となるのです。
そういう意味で、変換後の(Q_i),(P_i)の単位にはもはや意味がなく単なる数学的な変換を施しただけということになります。