【第7回Python流体の数値計算】1次元拡散方程式を差分法で実装する。
こんにちは(@t_kun_kamakiri)。
今回は、「1次元の拡散方程式」をPythonで実装するというのをやります。
前回の記事では、クーラン条件より「1次元の移流方程式」についての数値的安定性の内容をまとめましたが、「1次元の拡散方程式」も数値的安定性の条件が存在します。
本記事では、わざと数値的に不安定な状態での数値計算もやりますので、解の振る舞いがどのようになるのかを確認しながら見ていただければと思います。
☟前回の記事がまだの人はこちらから
本件の基本的な内容はこちらのサイトにそってやっていきます。
この記事ではこんな人を対象にしています。
- Pythonを使い始めたけどどう使うかわからない
- 流体の数値計算をはじめて勉強する人
- 一次元拡散方程式の数値計算
- 拡散方程式の安定性
1次元の拡散方程式とは
拡散方程式について簡単に解説をしておこうと思います。
1次元の拡散方程式
\frac{\partial u}{\partial t}= \nu \frac{\partial^2 u}{\partial x^2} \tag{1}
\end{align*}
これは名前の通り、初期状態の形(速度、温度など)が系の中で均等になるように拡散する偏微分方程式です。
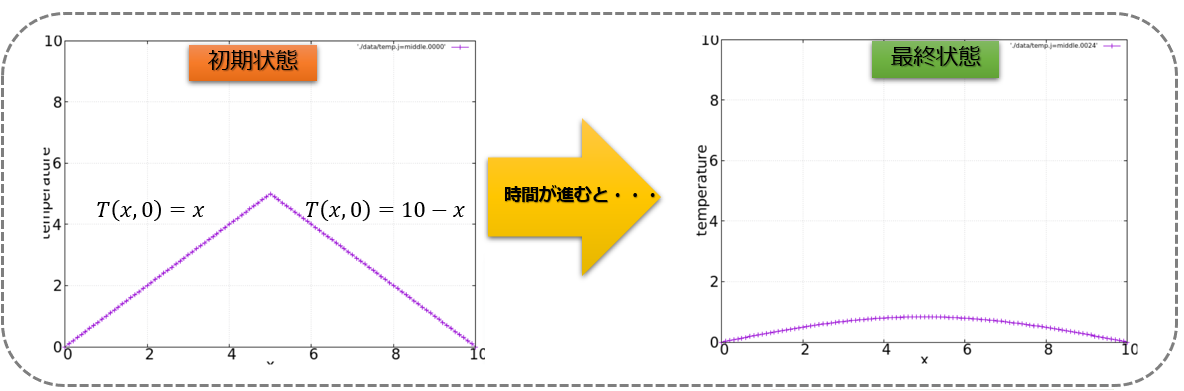
後ほど実際にPythonのコードを示しながらアニメーション作成を行いますので、その解の振る舞いを確認して理解を深めてもらえればと思います_(._.)_
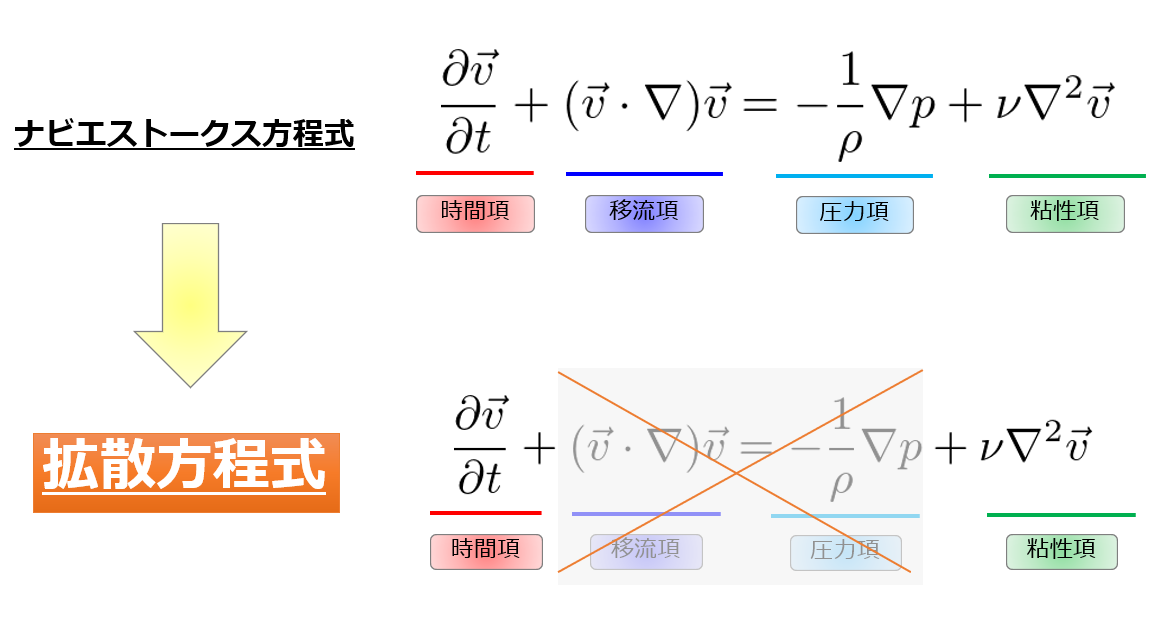
拡散方程式を離散化する
拡散方程式を、
- 時間の一階微分の項
- 空間の二階微分の項
となっています。
時間の項に対しては、
時間微分の項(第一項)
\frac{\partial u}{\partial t} \approx \frac{u(t+\Delta t)-u(t)}{\Delta t}\tag{2}
\end{align*}
u(x_0+\Delta x) = u(x_0) +\Delta x \frac{\partial u(x)}{\partial x}\bigg|_{x_0} + \frac{\Delta x^2}{2} \frac{\partial ^2 u(x)}{\partial x^2}\bigg|_{x_0} + \frac{\Delta x^3}{3!} \frac{\partial ^3 u(x)}{\partial x^3}\bigg|_{x_0} + O(\Delta x^4)\tag{3}
\end{align*}
さらに、
u(x_0-\Delta x) = u(x_0) -\Delta x \frac{\partial u(x)}{\partial x}\bigg|_{x_0} + \frac{\Delta x^2}{2} \frac{\partial ^2 u(x)}{\partial x^2}\bigg|_{x_0} – \frac{\Delta x^3}{3!} \frac{\partial ^3 u(x)}{\partial x^3}\bigg|_{x_0} + O(\Delta x^4)\tag{4}
\end{align*}
\frac{\partial ^2 u}{\partial x^2}=\frac{u(x+\Delta x)-2u(x)+u(x-\Delta x)}{\Delta x^2} + O(\Delta x^2)
\end{align*}
u_{i+1} = u_i + \Delta x \frac{\partial u}{\partial x}\bigg|_i + \frac{\Delta x^2}{2} \frac{\partial ^2 u}{\partial x^2}\bigg|_i + \frac{\Delta x^3}{3!} \frac{\partial ^3 u}{\partial x^3}\bigg|_i + O(\Delta x^4)\tag{5}
\end{align*}
u_{i-1} = u_i – \Delta x \frac{\partial u}{\partial x}\bigg|_i + \frac{\Delta x^2}{2} \frac{\partial ^2 u}{\partial x^2}\bigg|_i – \frac{\Delta x^3}{3!} \frac{\partial ^3 u}{\partial x^3}\bigg|_i + O(\Delta x^4)\tag{6}
\end{align*}
u_{i+1} + u_{i-1} = 2u_i+\Delta x^2 \frac{\partial ^2 u}{\partial x^2}\bigg|_i + O(\Delta x^4)
\end{align*}
\frac{u_{i}^{n+1}-u_{i}^{n}}{\Delta t}=\nu\frac{u_{i+1}^{n}-2u_{i}^{n}+u_{i-1}^{n}}{\Delta x^2}\tag{7}
\end{align*}
u_{i}^{n+1}=u_{i}^{n}+\frac{\nu\Delta t}{\Delta x^2}(u_{i+1}^{n}-2u_{i}^{n}+u_{i-1}^{n})\tag{8}
\end{align*}
フォン・ノイマンのフーリエ解析法
今回使う方法は、「フォン・ノイマンのフーリエ解析法」と呼ばれるものです。
名前だけで圧倒されそうな解法ですが、ポイントは以下となります。
【ポイント】
- 関数を波に分解→フーリエ変換(or フーリエ級数展開)
- 時間が経つと波の振幅が大きくなる(大きくなると不安定)
フーリエ変換について学びたい方は☟こちらからどうぞ!
時間が経つと波の振幅が大きくなる(大きくなると不安定)
(1)式を離散化して、時々刻々と変動する数値解を安定的求めるには、計算を進めるにあたって数値的な誤差が増大しないことが条件になります。
移流方程式には厳密解が存在するので、厳密解をとして\(\tilde{u}^{n}_{i}\)、数値解を\({u}^{n}_{i}\)とします。
そうすると、厳密解と数値解には誤差があるので誤差を\(\tilde{\epsilon}^{n}_{i}\)と置いておきしょう。
u^{n}_{i}=\tilde{u}^{n}_{i}+\tilde{\epsilon}^{n}_{i}
\end{align*}
これを(8)式に代入すると、誤差に関する方程式を得ることができます。
\tilde{\epsilon}^{n+1}_{i}=\tilde{\epsilon}^{n}_{i}+\frac{\nu\Delta t}{\Delta x^2}(\tilde{\epsilon}^{n}_{i+1}-2\tilde{\epsilon}^{n}_{i}+\tilde{\epsilon}^{n}_{i-1})\tag{8-1}
\end{align*}
誤差\(\tilde{\epsilon}^{n}_{i}\)、時刻\(n\)ステップと格子点\(i\)で以下のようにフーリエ級数展開を行います。
\tilde{\epsilon}^{n}_{i}=\sum A^{n}_{k}e^{Ik(i\Delta x)}\tag{9}
\end{align*}
これは、波数\(k\)の波\(e^{Ik(i\Delta x)}\)が\(A^{n}_{k}\)で重み付けされた形になっています。
※虚数は、格子点の\(i\)と紛らわしいので「虚数\(I\)」と表記しました。
これを(8-1)式に代入します。
(8-1)式は線形な方程式なので(9)式の和のほとんどは書かなくてもよくなります。
A^{n+1}_{k}=A^{n}_{k}+\alpha\bigg(A^{n}_{k}e^{Ik(i\Delta x)}-2A^{n}_{k}+A^{n}_{k}e^{-Ik(i\Delta x)}\bigg)\tag{10}
\end{align*}
※\(\alpha=\frac{\nu\Delta t}{\Delta x^2}\)と置いています。
これを今、以下のようにまとめます。
g& = \frac{A^{n+1}_{k}}{A^{n}_{k}}\\
& =1+\alpha\big(e^{Ik(i\Delta x)}-2+e^{-Ik(i\Delta x)}\big)\\
& =1-2\alpha\big(1-\cos\phi\big)
\end{align*}
※\(\phi=Ik\Delta x\)と置きました。
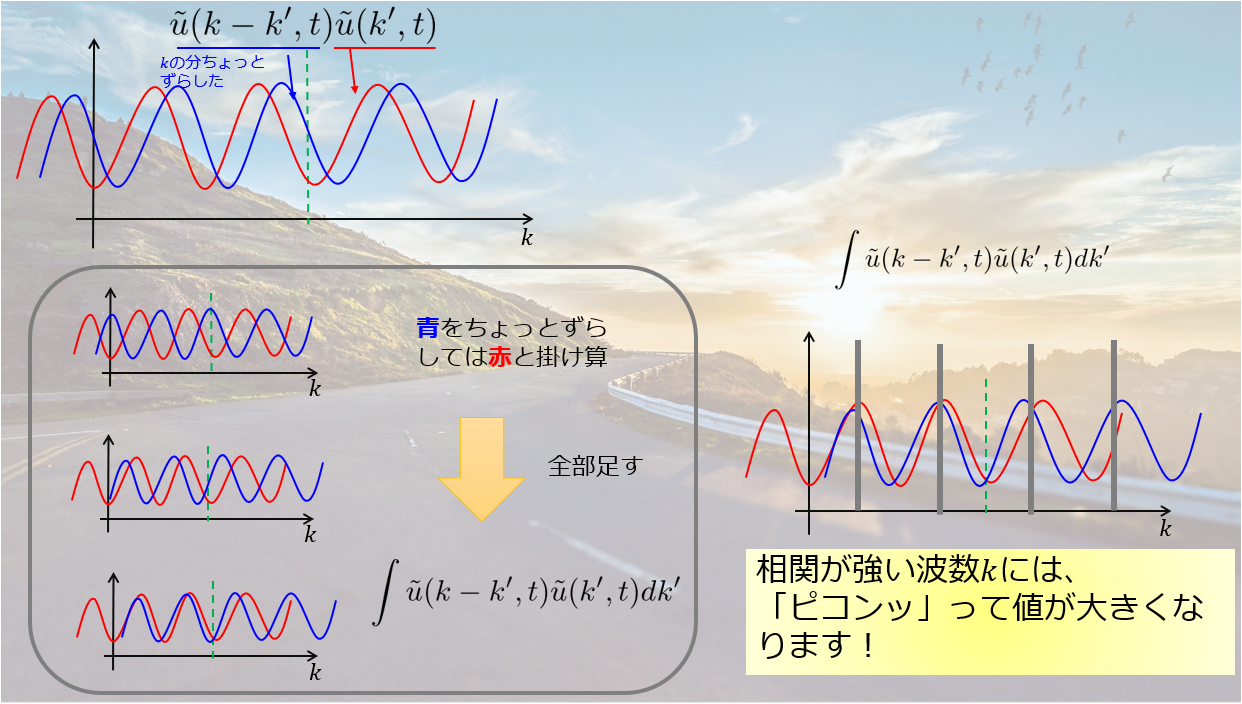
ちょっとわかりにくいので絵でイメージすると以下のようになります。
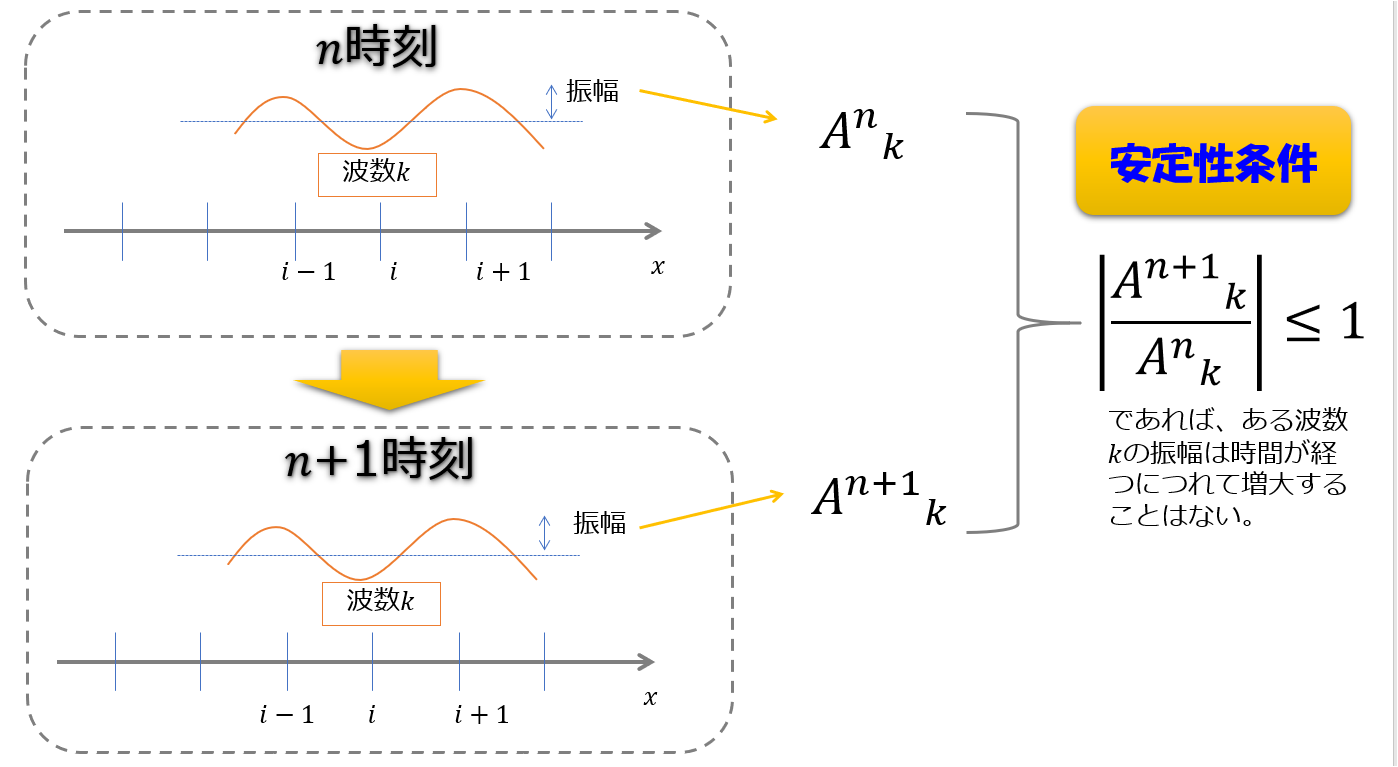 \(g = \frac{A^{n+1}_{k}}{A^{n}_{k}}\)が1より大きいという事は、ある波数\(k\)の重みがどんどん増大してやがて数値的には無視できないくらいの誤差になるということを意味しています。
\(g = \frac{A^{n+1}_{k}}{A^{n}_{k}}\)が1より大きいという事は、ある波数\(k\)の重みがどんどん増大してやがて数値的には無視できないくらいの誤差になるということを意味しています。
つまり、「n+1ステップでの波数\(k\)の重み」と「nステップでの波数\(k\)の重み」\(g = \frac{A^{n+1}_{k}}{A^{n}_{k}}\)を考えたときに、
\left\{\begin{matrix}
|g|\leq 1\,\,\,\,(安定)\\
|g|> 1\,\,\,\,(不安定)
\end{matrix}\right.
\end{align*}
という判別ができます。
どんな\(\phi\)に対しても\(|g|\leq 1\)であれば安定解を得るということですね。
つまり・・・
-1\leq \alpha \leq 1
\end{align*}
すなわち、
-1\leq 1-2\alpha\big(1-\cos\phi\big)\leq 1\tag{11}
\end{align*}
となります。
今の場合、\(g\)はどんな\(\phi\)に対しても1より小さいので問題になってくるのは、\(-1\leq 1-2\alpha\bigg(1-\cos\phi\bigg)\)です。
一番厳しい条件は\(\cos\phi=-1\)なので、どんな\(\phi\)に対しても(11)が成立するためには、
\alpha\leq \frac{1}{2}\tag{12}
\end{align*}
となります。
ここで、数値計算においては\(\Delta x\)を決めた後に時間幅\(\Delta t\)をいくつにしようか考えることが多いので、\(\Delta t\)についての条件式に書き換えておきます。
\Delta t\leq \frac{\Delta x^2}{2\nu}\tag{13}
\end{align*}
このように、空間幅\(\Delta x\)に対して時間幅\(\Delta t\)は(13)式を満たしていなければ安定ではない解となってしまうということを意味しています。
では、いよいよPythonを使って「1次元の拡散方程式」を解いてみましょう。
(13)の条件を「満たすもの」と「満たさないもの」に分けててシミュレーションをしてみます。

「\(\alpha=\)0.1、0.5、1.0」と変えてシミュレーション
では、Google Colaboratoryを使ってコードを書いて、解の振る舞いをアニメーションで見て理解を深めていきたいと思います。
(13)式より、\(\alpha\)は0.5より小さくないと安定解を得ることができないとわかったので、色々値を変えて検証していきます。
以下の3パターンで解析をします。
| \(\alpha\) | 解の振る舞い |
| 0.1 | ? |
| 0.5 | ? |
| 1.0 | ? |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 |
import numpy as np import matplotlib.pyplot as plt from matplotlib import animation, rc from IPython.display import HTML nx = 41 dx = 2 / (nx-1) nt = 25 nu = 0.3 alpha =1.0 dt = alpha* dx**2 /nu print('dx=',dx) print('dt=',dt) x = np.linspace(0,2,nx) un = [] u = np.ones(nx) u[int(.5 / dx):int(1 / dx + 1)] = 2 fig = plt.figure(figsize=(8,4)) ims=[] for n in range(nt): un = u.copy() if (nt%1==0): im = plt.plot(x,u, "r") ims.append(im) for i in range(1, nx - 1): u[i] = un[i] + nu * dt / dx**2 * (un[i+1] - 2 * un[i] + un[i-1]) plt.grid() plt.ylim([-0.1,3]) plt.xlabel("x") plt.ylabel("u(m/s)") anim = animation.ArtistAnimation(fig, ims) rc('animation', html='jshtml') plt.close() anim |
前回の記事と変わった点は、
- 偏微分方程式を解く部分が「u[i] = un[i] + nu * dt / dx**2 * (un[i+1] – 2 * un[i] + un[i-1])」となっています。
- un[i+1]があるため空間領域を「for i in range(1, nx – 1):」としています。
\(\alpha =0.1\)
この条件は、安定的に解ける条件のはずですがどうなるでしょうか。
☟動画を見てください。
安定していますね。
\(\alpha =0.5\)
この条件は、ギリギリ安定的に解ける条件のはずですがどうなるでしょうか。
☟動画を見てください。
じゃっかんギザギザしていますね。
\(\alpha =1.0\)
この条件は、不安定な解の振る舞いをする条件のはずですがどうなるでしょうか。
☟動画を見てください。
見てられないくらいめちゃくちゃな解の振る舞いをしてしまいました!!
結果まとめ
| \(\alpha\) | 解の振る舞い |
| 0.5 | 安定 拡散する |
| 1.0 | ちょっと不安定 じゃっかんガタガタ |
| 1.5 | 不安定 見てられない |
\left\{\begin{matrix}
|g|\leq 1\,\,\,\,(安定)\\
|g|> 1\,\,\,\,(不安定)
\end{matrix}\right.
\end{align*}
の条件と一致している数値計算の結果ですね。
まとめ
- 一次元拡散方程式の数値計算
- 拡散方程式の安定性
\Delta t\leq \frac{\Delta x^2}{2\nu}\tag{13}
\end{align*}
Pythonの完全初心者は書籍で学ぶとよい
Python自体が不安だという方は、こちらの書籍から勉強しても良いかも知れません。
☟こちらの本がPython初心者が挫折することなく勉強できる本です。
(本記事のようのPython使用環境と異なりますが、とてもわかりやすいので全く問題ありません)
流体の勉強をしたい方
流体の数値計算以前に、流体力学を勉強しないと!!って思っている方は以下の参考書からはじめてみるのが良いと思います。
工学よりに書かれていて実用的な内容も触れながら、流体の理論的な内容も易しく書かれていますので大学1年生で偏微分を学んだ方にとってはちょうどよい参考書です。
数値計算を勉強したい方
それをいかに誤差が少なく、安定的に解くかがカギになっており、数値的解法は多く提案されています。